产品中心Product center
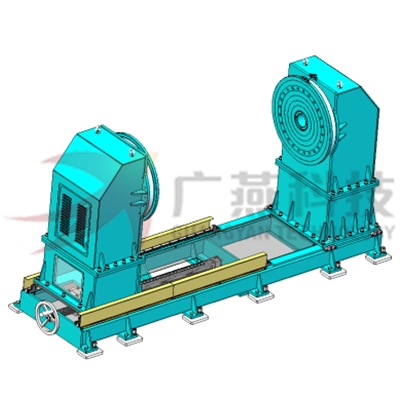
尾座手动丝杠式变位机
产品参数
| 产品名称 | 额定输入电压 | 输入电压范围 | 绝缘等级 | 可兼容夹具方式 | 程序容纳工件储存量 | 旋转角度 | 中心高 | 可实现的工艺 | 可通讯结合机器人品牌 |
| U型变位机 | 三相交流200V 50/60HZ | 三相交流200V±10% | H | 手动、气动、电控气动 | 50个不同工件的储存量 | 正负360度任意设定 | 700~1000mm | 焊接、切割 | FANUC、ABB、KUKA等 |
| 型号 | 驱动负载 | 最快翻转转速 | 负载持续率 | 外形尺寸(mm) | 重复定位精度 |
| GY-TWS-500 | 500KG | 10rpm | 80% | 依设计而定 | ±0.08mm |
| GY-TWS-1000 | 1000KG | 5rpm | 80% | 依设计而定 | ±0.08mm |
| GY-TWS-2000 | 2000KG | 4rpm | 80% | 依设计而定 | ±0.1mm |
-
主要应用领域:
机器人焊接 、切割等
产品特点:
◆适合于多面焊缝的焊接及多面切割;
◆进口精密RV减速机、精密伺服结合精密的加工装配工艺,有效保证变位重复定位精度及使用寿命;
◆尾座移动行程最长2米,采用手动或自动方式调节头尾座相对距离,适应长短尺寸变化在2米以内的产品,使用稳定性高;
◆尾座自动移动使用蜗轮蜗杆减速机,可与T形丝杠一起实现双重自锁功能。
◆电气技术与机器人良好的通讯融合,可与所有通讯开放的机器人结合配套使用。
◆可搭接该长度范围内的任意类型工装;
◆零点校正机构;
◆机械设计兼容了作业半径:1400/1600/1800/2000mm的工业机器人,机器人也可配置滑台,应用更广范;
◆若有夹具气管及电缆,则全部中空走线方式,保证变位机在旋转过程中不损坏线缆。




