智能焊接
焊接机器人对于焊接任务的自主规划技术;焊接机器人的导引跟踪运动轨迹控制技术;焊接环境识别以及焊接动态过程的信息传感、建模与智能控制技术;机器人焊接系统的集成与控制,将上述焊接任务规划、轨迹跟踪控制、传感系统、过程模型、智能控制等子系统的软硬件集成设计、统一优化调度与控制,涉及焊接柔性制造系统的物料流、信息流的管理与控制,多机器人与传感器、控制器的多智能单元协调以及基于网络通讯的远程控制技术等。
应用实例:
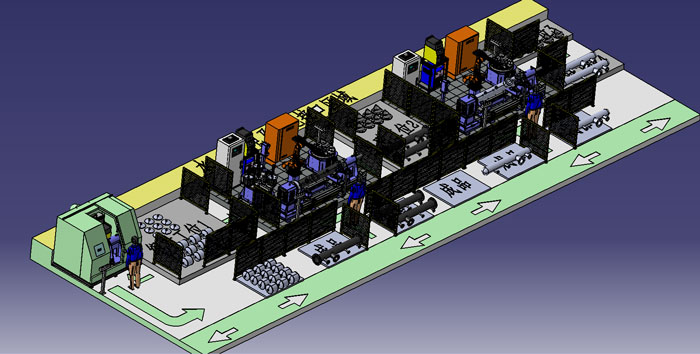
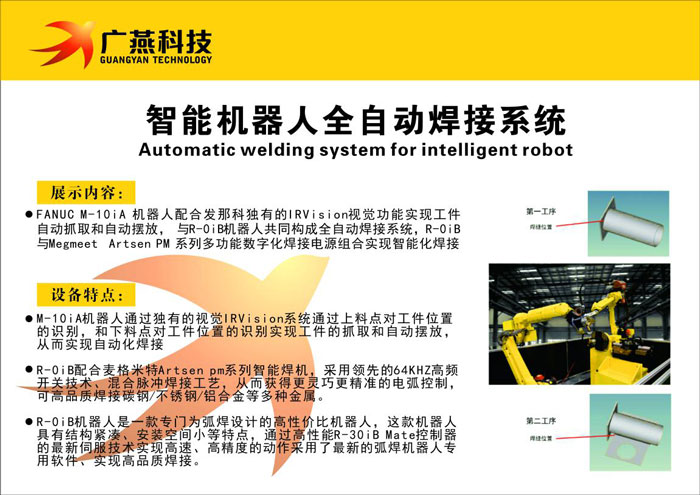
焊接机器人对于焊接任务的自主规划技术;焊接机器人的导引跟踪运动轨迹控制技术;焊接环境识别以及焊接动态过程的信息传感、建模与智能控制技术;机器人焊接系统的集成与控制,将上述焊接任务规划、轨迹跟踪控制、传感系统、过程模型、智能控制等子系统的软硬件集成设计、统一优化调度与控制,涉及焊接柔性制造系统的物料流、信息流的管理与控制,多机器人与传感器、控制器的多智能单元协调以及基于网络通讯的远程控制技术等。
应用实例:
